Drony schodzą pod wodę. Mają ku temu kilka powodów
Wojna w Ukrainie, ale również operacje specjalne prowadzone przez siły morskie oraz rosnące zagrożenie dla instalacji morskich i podwodnych, wskazują na rosnącą rolę bezzałogowych pojazdów podwodnych dla sił zbrojnych. Odbywające się w Gdańsku targi Baltexpo waz z salonem Balt-Military-Expo, na którym wystawcy prezentowali szeroką gamę uzbrojenia, sprzętu i wyposażenia dla marynarki wojennej, były okazją do zapoznania się z konstrukcjami kilku producentów.
 Modele bezzałogowych pojazdów podwodnych Hugin. Od góry Hugin 1000, Hugin Superior i Hugin Endurance
Modele bezzałogowych pojazdów podwodnych Hugin. Od góry Hugin 1000, Hugin Superior i Hugin Endurance
Remus 100M
Remus 100M jest niewielkim przenośnym bezzałogowym pojazdem podwodnym (UUV) przeznaczonym do zadań rozpoznawczych. Nie wymaga specjalistycznego wyposażenia, może być obsługiwany z przenośnego komputera. Dzięki temu nie musi być przenoszony przez okręty wojenne, ale może być dostarczony w rejon misji nawet na łodzi półsztywnej. Dzięki temu może być wykorzystywany w skrytych zadaniach rozpoznawczych, na przykład przez oddziały specjalne. Remus 100M był pierwszym w historii bezzałogowym pojazdem podwodnym wykorzystanym bojowo. Stało się to w 2003 r. przy okazji drugiej wojny w Iraku.
Te same cechy sprawiają, że Remus 100M może być wykorzystany w misjach ratunkowych. Minimalne zaplecze wymagane do jego obsługi sprawia, że może być szybko przerzucony drogą powietrzną na dowolny okręt czy statek prowadzący operację poszukiwawczo-ratunkową. Dokładne systemy nawigacyjne obejmujące nawigację bezwładnościową i system GPS umożliwiają podanie precyzyjnej lokalizacji odnalezionego zatopionego celu. Ponadto UUV może być wykorzystany do tworzenia mapy dna morskiego, wyznaczania bezpiecznych, wolnych od przeszkód podwodnych, przejść dla jednostek pływających, a także w podmorskiej geologii czy archeologii.

Podstawowym przeznaczeniem Remusa 100M jest wykrywanie min morskich na akwenach przybrzeżnych i w portach. Jest wyposażony w dwa sonary boczne Marine Sonics Mk II Arc Scout pracujące na częstotliwościach 900 i 1800 kHz oferujące rozdzielczość do 5 cm. Kierowanie pojazdem pod wodą odbywa się za pomocą Mikromodemu WHOI wykorzystującego rozchodzące się w wodzie fale akustyczne o częstotliwości 20-30 kHz. Maksymalna głębokość zanurzenia wynosi 100 m, zasięg to 67 km, czas pracy baterii wynosi 6 godzin, a prędkość maksymalna wynosi 4 węzły.
Dalsza część artykułu pod materiałem wideo
ZOBACZ TAKŻE: Czy warto kupić statyw Ulanzi Fotopro F38 Quick Relase Video Travel Tripod 3318?
Gavia AUV
Natomiast islandzkie przedsiębiorstwo Teledyne Gavia zaprezentowało autonomiczne pojazdy podwodne Gavia 500M i Gavia 1000M, gdzie liczby oznaczają maksymalną głębokość zanurzenia. Pojazdy rodziny Gavia mają modułową budowę i podobnie jak Remus mogą być obsługiwane przez dwóch ludzi z dowolnej platformy pływającej lub z brzegu.

W zastosowaniach wojskowych UUV Gavia może być wykorzystany do poszukiwania min morskich, akcji poszukiwawczo-ratunkowych czy szkolenia w zwalczaniu okrętów podwodnych. Jego modułowa konstrukcja umożliwia szybką wymianę wyposażenia misyjnego nawet w trakcie przebywania na morzu. Pojazd może być wyposażony w kilka typów sonarów pracujących na częstotliwościach 900 i 1800 kHz: Klein Side Scan, Edgetech Side Scan, Sub-bottom Profiling Module czy BlueView MB-2250 Micro Bathymetry Module. Inne moduły misyjne do zastosowań cywilnych mogą być wyposażone w komorę transportową z wyposażeniem naukowym, kamery, czujniki czy urządzenia do pobierania próbek z wody czy dna.
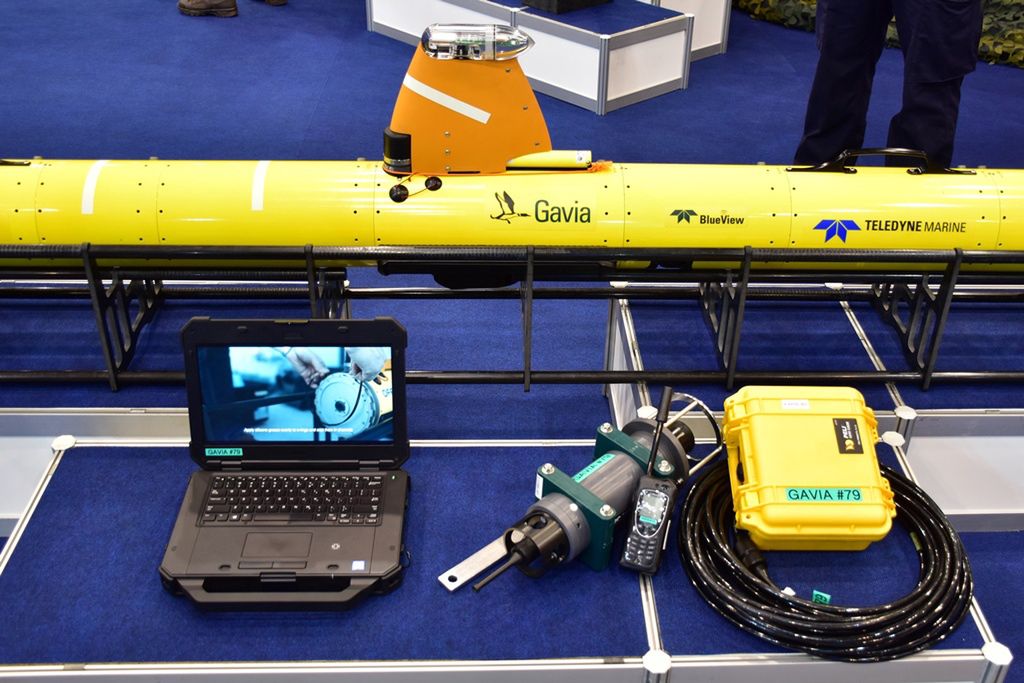
W konfiguracji standardowej kierowanie pojazdem odbywa się przez modem akustyczny, ale na życzenie może zostać zainstalowana również antena satelitarna. W zależności od konfiguracji Gavia ma 1,8-4,5 m długości i masę od 50 do 130 kg. Długotrwałość pływania wynosi 7-8 godzin przy prędkości 3 węzłów w zależności od wyposażenia. Urządzenia zużywające dużo prądu w oczywisty sposób szybciej wyczerpują akumulatory. Dla wydłużenia długotrwałości pływania, na przykład przy szkoleniu ZOP, pojazd można wyposażyć w trzy akumulatory. Nawigacja odbywa się za pomocą układu nawigacji bezwładnościowej i odbiornika GPS.
Głupak
Na stoisku marynarki Wojennej RP zaprezentowano będący już w służbie system obrony przeciwminowej Głuptak. Jest przeznaczony do identyfikacji i niszczenia min morskich wykrytych przez inne środki techniczne. Podstawowym elementem systemu są pojazdy bezzałogowe przenoszące ładunki wybuchowe do niszczenia min.

Jeśli wspomniane inne środki techniczne, sonary pokładowe lub inne bezzałogowe pojazdy podwodne, wykryją podejrzany obiekt, na miejsce wysyłany jest Głuptak. Na dziobie jest zainstalowana głowica z niewielkim sonarem, kamera i wskaźnikami laserowymi. Po wzrokowym potwierdzeniu, że wykryty obiekt jest miną Głuptak ustawia się obok niej, a laserowe wskaźniki naprowadzają na minę strumień ładunku kumulacyjnego niszczącego minę. W trakcie tej operacji wybuch niszczy również sam pojazd. Jeśli wykryty obiekt po rozpoznaniu zostaje uznany za bezpieczny, pojazd wraca na okręt macierzysty i może być wykorzystany ponownie.

Pojazd jest sterowany przewodowo, a kabel ma długość 2 km. W zależności od siły prądu morskiego zasięg wynosi do 1500 m, a czas pracy do 50 minut. Pojazd może niszczyć miny do głębokości 400 m. Głuptak może realizować operacje przy stanie morza 3 i prądzie wody wynoszącym 2 m/s. Masa głowicy bojowej wynosi 1,2 kg. Głuptaki są na wyposażeniu polskich niszczycieli min typu Kormoran II.
Hugin
Norweski Kongsberg oferuje całą rodzinę bezzałogowych pojazdów podwodnych pod wspólną nazwą Hugin. W zależności od wersji pojazdy tego typu mogą zanurzyć się do głębokości 6000 m. Pojazd może operować w trzech trybach: zdalnie sterowanym, półautonomicznym i autonomicznym, całkowicie bez udziału operatora. W zastosowaniach militarnych Hugin może być wykorzystany do wykrywania min morskich i zadań rozpoznawczych. Możliwe zastosowania cywilne obejmują dozór instalacji podwodnych, mapowanie dna morskiego, monitoring środowiska naturalnego, badania geologiczne czy operacje poszukiwawczo-ratunkowe.
Wśród dostępnego wyposażenia misyjnego można wymienić sonar wysokiej rozdzielczości High Resolution Iterferometric Synthetic Aperture Sonar pracujący na falach 70-100 kHz, echosondę EM2040 Multibeam Echosounder, kamery, sensor mętności wody, wykrywacz metanu, miernik prędkości prądów morskich i inne. Co ważne, wiele z tych urządzeń może być zainstalowanych i pracować jednocześnie dając operatorowi pełny obraz środowiska morskiego. Nawigacja odbywa się za pomocą systemu nawigacji inercyjnej wspomaganej nawigacją satelitarną. Łączność podwodna z operatorem jest realizowana przez modem akustyczny, ale pojazd może też działać w pełni autonomicznie po zaplanowanej wcześniej trasie.
Już w wersji podstawowej Hugin jest pojazdem dużym, liczy od 5,2 do 6,4 m długości i waży do 1500 kg. Rozwija prędkość do 6 węzłów. W zależności od poboru energii pojazd może pozostawać pod wodą do 72 godzin. Hugin Superior, którego masa sięga 2200 kg, ma o 30% większy zapas energii w stosunku do wersji podstawowej. Oznacza to, że może wykorzystywać bardziej energochłonne wyposażenie pływać szybciej, jednocześnie pozostając pod wodą do 3 dni.
Największy Hugin Enduracne ma 10 m długości i zapas energii pozwalający na operowanie przez 15 dni bez przerwy. Taka autonomiczność pozwala na poszerzenie wachlarza zastosowań na przykład o dozorowanie wybranych akwenów, na przykład kluczowych cieśnin, w poszukiwaniu okrętów podwodnych. System Hugin 1000 jest stosowany na niszczycielach min typu Kormoran II Marynarki Wojennej RP.