Canadarm2 – łapacz statków kosmicznych. Cud techniki na orbicie Ziemi
11 marca 2008 roku z Centrum Kosmicznego Johna F. Kennedy’ego wystartował prom kosmiczny Endeavour. Dowodzona przez Dominica Gorie, 6-osobowa załoga zabierała na orbitę jednego pasażera, członka załogi Międzynarodowej Stacji Kosmicznej i bardzo niecodzienny ładunek – robota Dextre, czyli kluczową część manipulatora Canadarm2, służącego w roli wielkiego, kosmicznego dźwigu.
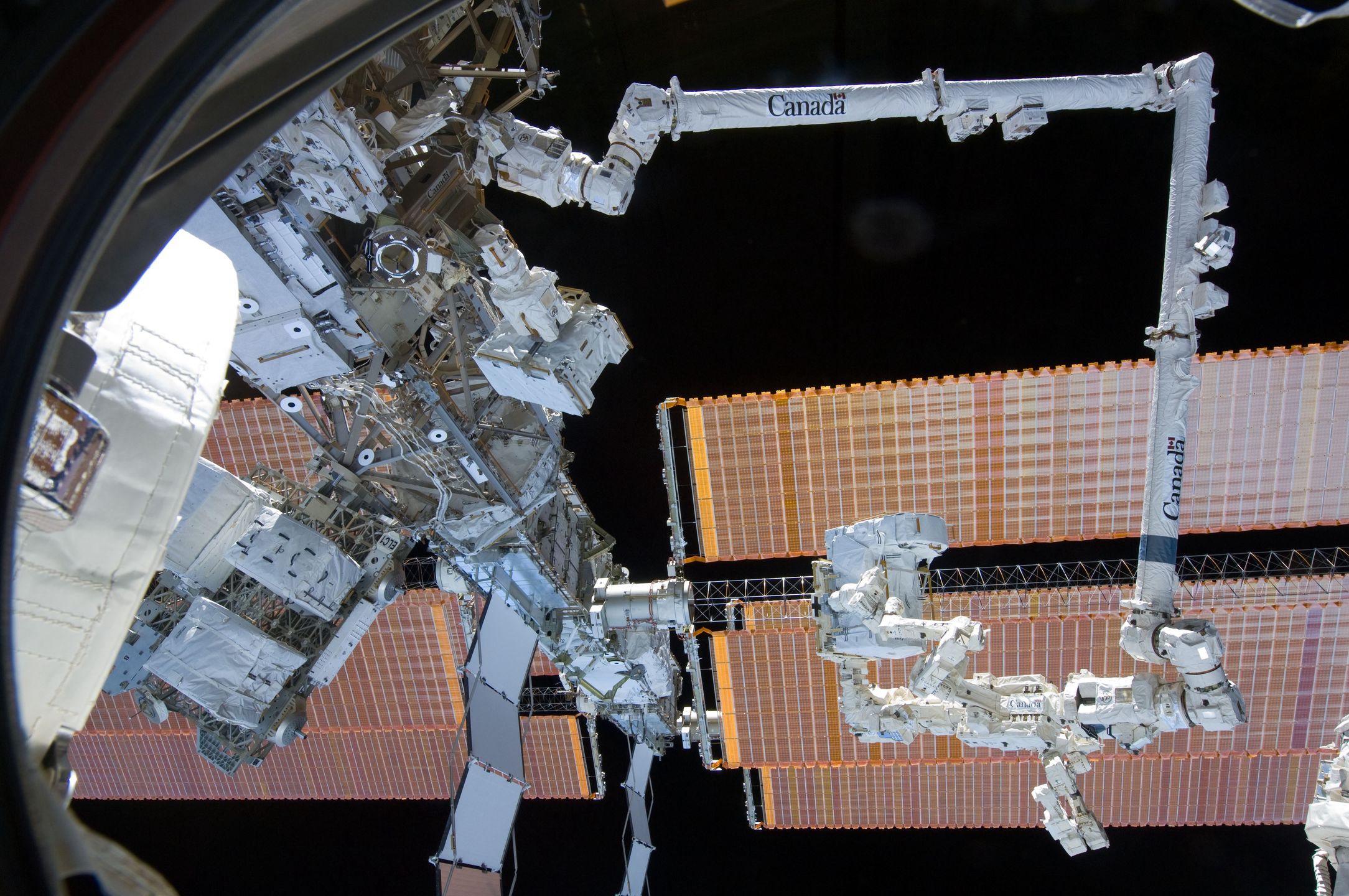
 Astronauta przymocowany do końca ramienia Canadarm2
Astronauta przymocowany do końca ramienia Canadarm2
"Każdy, kto siedzi na szczycie największego na świecie zbiornika wodoru i tlenu (…) i nie martwi się ani trochę, najwyraźniej nie w pełni rozumie swoją sytuację" – stwierdził niegdyś astronauta John Young, uczestnik misji STS-1, czyli pierwszego z długiej serii lotu wahadłowca.
Trudno o lepsze podsumowanie tego, czym był rozpoczynający kosmiczną misję wahadłowiec. Jak zauważa Adam Adamczyk z serwisu "Kwantowo", "wiele osób sądzi, że to ten biały samolot o charakterystycznej sylwetce, przyczepiony do rakiety".
Dalsza część artykułu pod materiałem wideo
Tymczasem misję rozpoczynał nie wahadłowiec, ale zestaw o nazwie STS, składający się z samego wahadłowca umieszczonego na gigantycznym zbiorniku z paliwem, do którego boków doczepiono dwie dodatkowe rakiety na paliwo stałe, pełniące pomocniczą rolę podczas startu.
Kosmiczna ciężarówka
Start takiego zestawu wymagał ogromnej mocy silników. 700 ton wodoru wystarczało na zaledwie 8 minut pracy napędu, dzięki któremu 37-metrowy wahadłowiec był w stanie dotrzeć na orbitę naszej planety i dostarczyć na nią to, co było celem większości misji: zawartość swojej 18-metrowej ładowni. W praktyce wahadłowiec był czymś w rodzaju latającej ciężarówki, kursującej pomiędzy Ziemią i jej orbitą z różnymi ładunkami.
W przypadku misji STS-123 w ładowni znajdowała się część japońskiego modułu Kibō, czyli kosmicznego laboratorium, a także cud techniki opracowany przez kanadyjskich inżynierów: manipulator kosmicznego dźwigu Canadarm2.
Łapacz satelitów
Kosmiczny dźwig to jeden z ciekawszych elementów stacji ISS. Jego wyprodukowana w pięciu egzemplarzach, pierwsza wersja trafiła na pokład wahadłowców, gdzie – zamontowana w ładowni – pozwalała na manipulowanie różnymi obiektami w przestrzeni kosmicznej.

Canadarm w ziemskich warunkach był zupełnie bezużyteczny, bo mechanizmy dźwigu były zbyt słabe, aby unieść swój własny ciężar. Pełnię możliwości Canadarm pokazywał dopiero w stanie mikrograwitacji, gdzie sześć stopni swobody, z jakimi mogły poruszać się jego elementy, upodabniało całe urządzenie do ludzkiej ręki. Do czego przydaje się taki sprzęt?
W kosmicznych warunkach Canadar, pełnił podobną rolę, jak dźwig z chwytakiem na Ziemi: pozwalał na wyciągnięcie z ładowni wahadłowca różnych ładunków i umieszczenie ich w przestrzeni kosmicznej.
Tym, co budziło największe emocje, była jednak nie możliwość wyciągania ładunków z wnętrza ładowni wahadłowca, ale – przeciwnie – łapania czegoś znajdującego się w kosmosie i umieszczania w ładowni, co w teorii mogło służyć m.in. do wrogiego przejmowania satelitów.
Zbudowany z tytanu i stali nierdzewnej Canadarm mógł manipulować przedmiotami w przestrzeni z precyzją sięgającą pięciu centymetrów, co okazało się kluczowe m.in. podczas prowadzonej na orbicie naprawy teleskopu Hubble’a. Canadarm okazał się niezastąpiony także podczas kosmicznej budowy - montażu z dostarczanych przez lata, kolejnych modułów Międzynarodowej Stacji Kosmicznej.
Canadarm2 – kosmiczny dźwig nowej generacji
Dostarczony wraz z misją STS-123, nowy wysięgnik Canadarm2, oferuje jeszcze większe możliwości. Maszyna mierzy ponad 17 metrów, ma siedem przegubów i wymienne końcówki, dzięki którym można dostosować ją do aktualnie wykonywanych zadań.
Zakończeniem robotycznego ramienia może być także człowiek – przyczepiony do końca wysięgnika astronauta, wykonujący na orbicie różnego rodzaju prace.
Praktycznym rozwiązaniem są zakończenia o nazwie LEE (Latching End Effector – krańcowy efektor zatrzaskowy), które można umieścić na obu końcach ramienia. Dzięki nim dźwig może "kroczyć" po powierzchni ISS, podłączając naprzemiennie swoje ramiona do gniazd serwisowych, zapewniających zasilanie, transfer danych i pogląd wideo.
W ten sposób ramię jest w stanie dotrzeć do dowolnego zakątka stacji kosmicznej, co ułatwia jej serwis i rozbudowę. Ramię może także poruszać się korzystając z rozwiązania o nazwie Mobile Remote Servicer Base System – specjalnej kratownicy, stanowiącej podstawę dla wózka, który może przemieszczać się po jej powierzchni.
Orbitalny chwytak Dextre
Zakończeniem ramienia może być także dwupalczasty chwytak o nazwie Dextre (to samodzielny robot, który może działać niezależnie od dźwigu). Dzięki niemu można w kosmosie chwytać i przemieszczać różne obiekty.
Jest on wyposażony w sensory monitorujące siłę, z jaką trzymany jest dany obiekt, a informacja o tym przekazywana jest poprzez sprzężenia zwrotne obsługującemu chwytak astronaucie. Ten może znajdować się na stacji kosmicznej (dwa stanowiska kontrolne) lub obsługiwać robota w pełni zdalnie ze stanowiska nadzorczego na Ziemi.
Jednym z zadań Dextre jest łapanie na orbicie statków kosmicznych. Pochwycone przez Dextre obiekty takie, jak japoński statek H-II czy amerykański, zbudowany przez SpaceX Dragon, są następnie cumowane do stacji. Dextre służy także do odłączania statków kosmicznych od ISS przed ich powrotem na Ziemię.