Najtrudniejsze misje dla dronów. Wojskowi wyciągnęli wnioski z wojny w Ukrainie
Jak pokazują doświadczenia z wojny w Ukrainie, ale też innych konfliktów zbrojnych, bezzałogowe systemy latające – autonomiczne i zdalnie sterowane – wypełniają coraz szersze spektrum zadań i już od dawna nie ograniczają się jedynie do misji rozpoznawczych. W poszukiwaniu możliwych nowych zastosowań dla dronów przemysł i wojskowi kierują wzrok nad morze badając możliwość wykorzystania bezpilotowców do jednego z najtrudniejszych zadań dla lotnictwa – wykrywania i zwalczania okrętów podwodnych.
 MQ-4 Triton
MQ-4 Triton
Patrząc historycznie, zwalczanie okrętów podwodnych raz nabierało szczególnego znaczenia, innym razem było traktowane po macoszemu. Poza szczególnymi przypadkami pierwszej i drugiej wojny światowej szczególny nacisk na zadania tego typu był kładziony przez NATO w czasie zimnej wojny. Radzieckie okręty podwodne stanowiły poważne zagrożenie dla linii komunikacyjnych łączących Stany Zjednoczone z Europą Zachodnią i mogły wpłynąć na odcięcie wojsk walczących w Europie od zaopatrzenia.
Po zakończeniu zimnej wojny i pogrążaniu się Rosji w kolejnych kryzysach gospodarczych owocujących między innymi upadkiem sił zbrojnych, w tym marynarki wojennej, zwalczanie okrętów podwodnych przestało być priorytetem. Kolejne odwrócenie trendu nastąpiło w połowie ubiegłej dekady, gdy w związku z rosnącą agresją rosyjską i napaścią na Ukrainę NATO ponowie uznało zwalczanie okrętów podwodnych za jeden ze swoich priorytetów.
Dalsza część artykułu pod materiałem wideo
SięKlika #19 - wiadomości technologiczne
Porównując pojazdy bezzałogowe do załogowych można wyróżnić kilka cech wyróżniających mających znaczenie taktyczne. Drony mogą mieć większą długotrwałość lotu nieograniczoną zmęczeniem załogi, mogą operować w zróżnicowanym środowisku bez konieczności przeszkalania załogi, na przykład z technik ratownictwa morskiego, mogą operować z bardziej niebezpiecznym środowisku, bo nie ma ryzyka utraty załogi, lepszy stosunek masy ładunku użytecznego do masy całkowitej oraz mniejsze rozmiary umożliwiające przenoszenie większej liczby bezpilotowców przez okręty.
W odniesieniu do zadań zwalczania okrętów podwodnych oznacza to, że drony mogą wykonywać długotrwałe, ale monotonne zadania patrolowania czy dozorowania wybranego obszaru. Właśnie misje tego typu zużywają najwięcej cennego resursu morskich samolotów patrolowych. Wyzwaniem, nad którym pracuje przemysł, pozostaje zwiększenie liczby zabieranych sensorów oraz metody szybkiego przesyłu ogromnej liczby danych z tych sensorów do komputerów pokładowych na okrętach wojennych. Jednak w niedalekiej przyszłości można się spodziewać szerszego wykorzystania dornów w zadaniach ZOP, które będą wykorzystywane do patrolowania i wstępnego wykrywania celów i wskazywania ich klasycznym samolotom i śmigłowcom, które podejmą szczegółowe śledzenie celu lub wykonają atak torpedowy.

Przykładem drona dysponującego odpowiednimi parametrami jest MQ-4 Triton. Jest on wystarczająco duży, ma odpowiednią długotrwałość lotu i udźwig aby zabrać niezbędne wyposażenie. W tej chwili jego pakiet sensorów pozwala jedynie na wypełnianie pomocniczych zadań w misjach ZOP. MQ-4 może wykrywać okręty podwodne na powierzchni lub zanurzone, ale z wysuniętymi peryskopami bądź innymi masztami. Może też wykrywać wszystkie emisje elektromagnetyczne emitowane przez te okręty. Nie ma jednak żadnych akustycznych środków wykrywania.

Jednak biorąc pod uwagę jego wymiary i zdolności transportowe można sobie wyobrazić zintegrowanie MQ-4 z systemem LASH (Littoral Airborne Sensor Hyperspectral) wykorzystującym kamery pracujące w różnych pasmach i wykrywające drobne różnice w poszczególnych widmach do wykrywania obiektów znajdujących się na małej głębokości. Możliwe jest również wykorzystanie laserowych systemów zobrazowania podwodnego lub systemów komputerowych pozyskujących dane z innych okrętów lub instalacji podwodnych. Ze względu na to, że do precyzyjnej lokalizacji okrętu podwodnego wymaganych jest kilkadziesiąt boi sonarowych wykorzystanie do ich przenoszenia dużego MQ-4, a tym bardziej mniejszych dronów, jest mało prawdopodobne.

Podobnie sytuacja wygląda z bardziej rozpowszechnionymi i bazującymi na pokładach okrętów wojennych mniejszymi bezpilotowcami w rodzaju RQ-21A Blackjack czy Scan Eagle. W tej chwili ich wykorzystanie w zadaniach ZOP jest ograniczone do wzrokowej identyfikacji okrętów podwodnych z wykorzystaniem głowic optoelektronicznych. Jednak można sobie wyobrazić wyposażenie tych niewielkich samolotów w bardziej wyspecjalizowane sensory, na przykład detektory anomalii magnetycznych. W ten sposób mogłyby znacząco wpłynąć na zmniejszenie liczby lotów i oszczędzanie resursów cennych morskich samolotów patrolowych i śmigłowców pokładowych.

W grupie siła
Ciekawe możliwości oferują też niewielkie bezpilotowce działające w roju. W 2017 r. Departament Obrony USA przeprowadził doświadczenie z wykorzystaniem 103 zaprojektowanych w Massachusetts Institute of Technology mikrodronów Perdix. W trakcie testu udowodniono możliwość ich wykorzystania w ramach jednego roju, w którym drony samodzielnie pilnowały swojej pozycji w różnych formacjach, a w razie wystąpienia usterki jednego lub kilku samodzielnie dostosowywały formację, aby nadal skutecznie wypełnić powierzone zadanie rozpoznawcze.
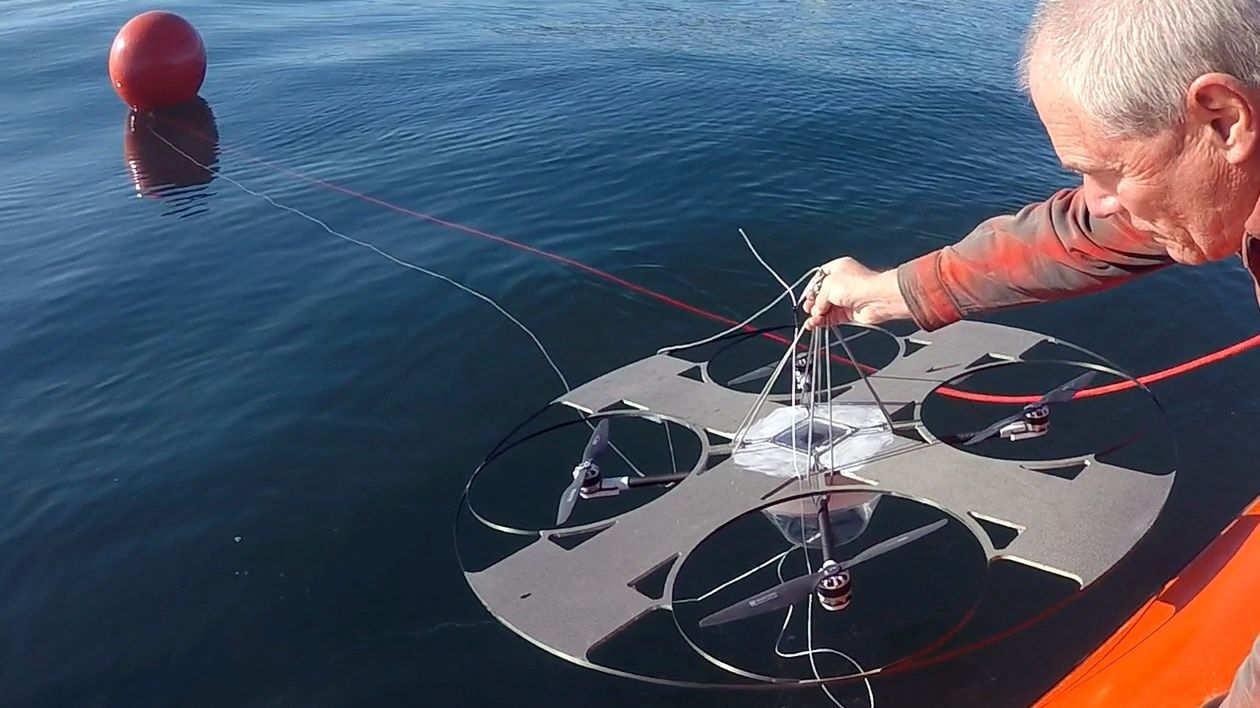
Takie zastosowanie roju dronów w przyszłości może być wykorzystane do śledzenia uciekających, mocno manewrujących okrętów podwodnych. Można sobie wyobrazić przeniesienie oprogramowania sterującego Perdixami na przykład na drony Aqua-Quad – zbudowane w układzie quadrocoptera drony zasilane z ogniw słonecznych dające im trzymiesięczną autonomiczność. W dodatku drony tego typu mogą wylądować na powierzchni morza i opuścić pod wodę niewielki sensor akustyczny, następnie go schować, ponownie wystartować i zmienić pozycję. Wykorzystując pojazdy tego rodzaju działające autonomiczne w ramach roju można prowadzić długotrwałe patrole wczesnego wykrywania jak i śledzić konkretny wykryty już obiekt.
W przykładowym scenariuszu formacja Aqua-Quadów mogłaby dozorować wybrany obszar, na przykład cieśninę. Po wykryciu okrętu podwodnego formacja samodzielnie by go otaczała w ten sposób, że kilka z nich zawsze znajdowałoby się przed okrętem podwodnym dając w ten sposób czas pozostałym na zmianę położenia lub pozostawanie w gotowości na zmianę sytuacji. Przy wykorzystaniu roju liczącego około 20 quadrocopterów zawsze byłaby do dyspozycja ich odpowiednia liczba do poprawnego namierzenia obiektu podwodnego.

Aby system działał skutecznie drony muszą być wyposażone w system autonomicznego sterowania pozwalający na samodzielne komunikowanie się maszyn pomiędzy sobą i ustalanie odpowiedniej formacji i przydzielanie zadań. Po drugie drony muszą być wyposażone w system łączności z nadrzędnym brzegowym lub okrętowym stanowiskiem dowodzenia, aby mogły poinformować o wykryciu okrętu podwodnego dać człowiekowi czas na decyzję o dalszych krokach. Aby nie instalować na każdym silnej i ciężkiej radiostacji możliwe by było włączenie do grupy większego drona z radiostacją orbitującego na większej wysokości, który byłyby retranslatorem łączności pomiędzy rojem małych dronów a stanowiskiem dowodzenia.

Chociaż drony wykorzystywane dzisiaj mogą być przydatne do wykrywania okrętów podwodnych jedynie w ograniczonym stopniu, jak pokazują powyższe przykłady, w przyszłości ich rola w tych zadaniach może się znacznie zwiększyć. Doświadczenia i analizy wskazuję, że mogą to być bardzo przydatne urządzenia do wstępnego wykrywania i śledzenia okrętów podwodnych. Jednocześnie ze względu na masę i rozmiary torped jak również kwestie prawne wydaje się, że do odpalania uzbrojenia w przewidywalnej przyszłości nadal będą wykorzystywane jedynie konwencjonalne samoloty i śmigłowce.
Autor: Marcin Wołoszyk