AI przejmuje stery na ISS. Robot Astrobee porusza się 60 proc. szybciej
Na pokładzie Międzynarodowej Stacji Kosmicznej (ISS) po raz pierwszy sprawdzono system sterowania oparty na uczeniu maszynowym. Robot Astrobee przemieszcza się dzięki niemu szybciej o 50–60 proc., utrzymując przy tym wszystkie rygorystyczne zasady bezpieczeństwa.
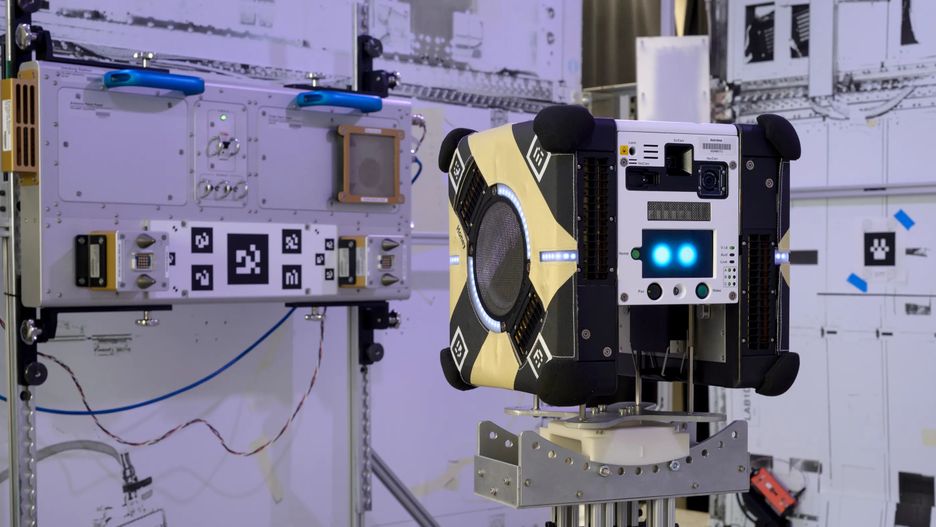 Robot Astrobee
Robot Astrobee
Na Międzynarodowej Stacji Kosmicznej przetestowano nowy system nawigacji dla robota Astrobee. Zespół ze Stanfordu wdrożył algorytm, który pozwala maszynie samodzielnie planować trajektorię lotu przez wąskie korytarze i zagracone sekcje stacji. Astronauci ograniczyli się do przygotowania i zakończenia prób, polecenia natomiast przesyłane były na pokład robota bezpośrednio z centrum NASA.
Wnętrze stacji kosmicznej jest gęsto zabudowane sprzętem i okablowaniem, co utrudnia planowanie ruchu. Autorzy wskazują, że komputery lotne mają mniej zasobów niż systemy naziemne, a wymagania bezpieczeństwa są wyższe. Z tego też powodu naukowcy postanowili zaprojektować rozwiązania pozwalające na optymalizację tras przy wsparciu algorytmów sztucznej inteligencji (AI), które jednocześnie gwarantują zachowanie wszystkich ograniczeń bezpieczeństwa.
Podstawą nowego systemu jest planowanie z użyciem sekwencyjnego programowania wypukłego. O ile klasyczne podejście było niezwykle czasochłonne, o tyle teraz badacze wytrenowali model, który na podstawie wcześniejszych rozwiązań i trajektorii dostarcza robotowi pierwszą trajektorię, która stanowi dobre przybliżenie idealnej trajektorii, a w międzyczasie algorytm optymalizujący dopracowuje szczegóły przejścia z miejsca A do B.
Zanim system trafił na orbitę, testowano go w ośrodku NASA Ames na platformie unoszącej się w warunkach mikrograwitacji. Na ISS sprawdzono 18 trajektorii, każdą w dwóch wariantach: standardowym i wyposażonym w algorytmy AI. Wyniki były jednoznaczne: AI gwarantowało usprawnienie pracy robota także w wymagających manewrach obejmujących rotację robota w przestrzeni.
Według kierującej pracami Somrity Banerjee, klucz tkwi w wykorzystaniu doświadczenia z tysięcy wcześniejszych trajektorii, które znacząco skraca czas obliczeń. System uzyskał w NASA poziom gotowości technologicznej TRL 5, co potwierdza jego działanie w realnym środowisku operacyjnym i zmniejsza ryzyko w kolejnych projektach tego typu.
Zespół kierowany przez Marco Pavone zapowiada rozwój podejścia z użyciem mocniejszych modeli AI, podobnych do tych stosowanych w nowoczesnych systemach językowych i systemach jazdy autonomicznej. Badacze podkreślają, że rosnąca skala i odległość planowanych misji kosmicznych od Ziemi wymusi większą autonomię robotów bez nadzoru z Ziemi.